Contexte
Lors d’opérations offshore de maintenance ou inspection, un opérateur commande à distance un ou deux bras robotisés intégrés sur un véhicule téléguidé (ROV). Le seul sens dont il dispose alors est la vision. Certains bras de nouvelle génération disposent d’un retour d’effort au contact, mais ces opérations restent difficiles en phase d’approche, et particulièrement en eaux troubles.
Le projet COBOBIO est porté par le CEA Tech.
Ruptures scientifiques et innovation
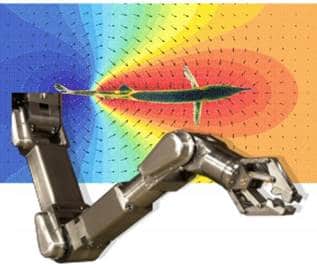
- Ce nouveau type de capteurs électriques bio-inspirés permet avant contact et en aveugle de détecter un obstacle, d’inspecter une surface, de manipuler avec précision des objets.
- La boucle électro-haptique permet d’informer l’opérateur par un retour de force sur le bras maitre de commande et donc d’augmenter sa perception de la scène d’intervention.
Applications EMR :
Les résultats du projet permettront d’envisager un transfert industriel de la technologie avec des applications directes pour toute les opérations d’installation sur site et maintenance de systèmes EMR (par ex. inspection de jackets d’éolienne, connexion de câbles, vérification ensouillement des câbles, …).
A terme, on peut envisager d’étendre le cadre applicatif au vecteur de transport lui-même pour le guidage de véhicules sous-marins.
Impact technique et économique attendu
- Installation et maintenance in-situ de systèmes EMR
- Sécurité active pour limiter la casse de bras télé-opérés
- Réduction du temps d’intervention offshore
- Elargissement des capacités opérationnelles
- Amélioration des conditions de travail de l’opérateur
Dates clés du projet
- Mai 2014 - Lancement du projet
- Décembre 2015 - Boucle électro-haptique dans l’eau
- Décembre 2017 - Démonstrateur de télé-opération offshore
- Mai 2018 - Boucle électro-haptique dans l’air
Démonstrateur
- Démonstration de la boucle électro-haptique dans l’eau
- Démonstration de la télé-operation offshore
- Démonstration de la boucle électro-haptique dans l’air