
Contexte
La commande d’un générateur éolien est développée en tenant compte des paramètres du réseau et de l’interaction du système éolien avec le réseau. Les principales grandeurs contrôlées sont la vitesse de la machine et la puissance active et réactive échangées avec le réseau. La commande est basée sur l’utilisation d’un modèle de commande qui permet la prise en compte du système électrique auquel la machine est connectée. De cette manière, en plus des objectifs locaux (i.e. liés à la machine, comme le suivi des consignes de tension et vitesse), des services réseau – comme le soutien en tension, en fréquence ou l’amortissement des oscillations hyposynchrones – peuvent être assurés.
De plus, la nouvelle commande basée sur un modèle étendu (machine + réseau) de commande pourra suivre les évolutions en temps réel du réseau grâce à un paramétrage direct. La validation du couplage machine-réseau se fera à la fois en simulation ainsi que sur un benchmark de type hardware in the loop.
Ruptures scientifiques et innovation
Le projet COMEOL de Centrale Nantes est à la frontière de deux disciplines : l’automatique – pour la synthèse des lois de commande – et l’électrotechnique-électronique pour la partie réseau et machine/électronique de puissance.
La connexion de la machine au réseau est prise en compte pour la synthèse de la loi de commande afin de garantir des performances a priori et les vérifier par des simulations a posteriori (i.e., après avoir proposé une loi de commande). Le modèle de commande envisagé capte directement les caractéristiques du réseau auquel la machine sera connectée. En plus d’une prise en compte directe, ceci permet aussi une adaptation de la commande aux variations de la structure et du point de fonctionnement du réseau. Pour faire face à ces exigences, une approche de commande innovante – bien différente par sa conception ainsi que la forme finale pour la mise en œuvre de l’approche classique de commande vectorielle – est envisagée.
Impact technique et économique attendu
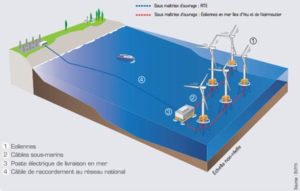
Ce projet vise à améliorer le service d’un champ d’éoliennes offshore au réseau de transport d’électricité (fréquence, tension, besoin en réactif,…) en développant une commande des éoliennes innovantes permettant de s’adapter en temps réel à la fois aux modifications des besoins du réseaux et de la production du parc d’éoliennes offshore.
Les entreprises partenaires de ce projet auront une meilleure maîtrise des problématiques de raccordement des générateurs éoliens au réseau électrique. Elles pourront prendre des meilleures décisions dans leurs projets futurs, et utiliser ces commande-contrôle innovants dans le cadre de leur futurs développements technologiques.
Dates clés du projet
- Juin 2017 - Proposition de la méthodologie de commande
- Décembre 2017 - Première mise en œuvre/validation hardware in the loop
Résultats
Ce projet porte sur la commande robuste d’un générateur synchrone à aimants permanents (PMSG) connecté à un réseau.
La première contribution du projet est la modélisation d’un système de conversion de l’énergie éolienne basé sur une machine à aimant permanent – Permanent Synchronous Generator (PMSG) – connecté au réseau électrique par 2 convertisseurs back-to-back. La commande robuste avancée est tributaire d’un modèle analytique du système complet (et non seulement d’une interconnexion de blocs prédéfinis dans un outil de simulation comme Simulink/Simscape). Ce modèle a été construit et validé. La commande a été synthétisée à partir de ce modèle, puis testée en simulation en MATLAB.
La deuxième contribution du projet porte sur une nouvelle méthode de contrôle pour le modèle proposé.
C’est une commande robuste à retour d’état complet du système. Elle a la particularité de directement prendre en compte (d’une manière analytique) la puissance de court-circuit du réseau auquel le générateur est connecté. Cela apporte une robustesse par rapport à la variation du point de fonctionnement du réseau et un meilleur rejet des perturbations (comme les court-circuits, les creux de tension). Cela permet au générateur de rester connecté au réseau lors de ces perturbations et, par conséquent, de mieux participer aux services système.
Publications et communications produites
Communications en congrès internationaux avec actes :
Converter Nonlinear Fuzzy Control of PMSG-Based for Wind Energy System in Network Context, Elkhatib Kamal and Bogdan Marinescu, Actes de 2019 IEEE PES Innovative Smart Grid Technologies Europe (ISGT–Europe), Bucarest-Romania, July 2019.




