Contexte
Les systèmes EMR (Energies Marines Renouvelables) intègrent des fonctions avancées de contrôle commande pour optimiser le rendement de la conversion énergétique. Dans le cas d’une éolienne flottante, l’orientation de la nacelle, le couple sur l’arbre du rotor, ainsi que l’orientation des pâles sont continuellement mis à jour. Les valeurs de consignes sont calculées suivant une loi de commande qui prend en compte la vitesse et la direction du vent incident et les mouvements de la plateforme. Pour les machines houlomotrices, on peut optimiser l’extraction d’énergie en ajustant en temps réel le couple résistant sur l’arbre de la génératrice en fonction généralement de la houle incidente et des mouvements du système.
Les bassins de Centrale Nantes permettent de reproduire en laboratoire des conditions contrôlées de houle, vent et courant. Ces moyens d’essais sont souvent utilisés pour modéliser des systèmes EMR en conditions de production, de survie, ou d’installation. Une des difficultés principales de la modélisation expérimentale d’un système EMR est de représenter et contrôler à échelle réduite l’amortissement dû à la conversion d’énergie.
L’équipe de modélisation expérimentale du laboratoire LHEEA propose ici d’équiper ses maquettes d’un contrôleur embarqué capable d’assurer le pilotage temps réel d’actionneurs ainsi que l’enregistrement des mesures issues des capteurs. Le contrôleur acquiert les signaux, calcule les consignes suivant une stratégie de contrôle commande et pilote les actionneurs. Son système d’exploitation temps réel permet de garantir que l’exécution de ces tâches est réalisée dans un intervalle de temps toujours identique.
Ruptures scientifiques et innovation
Dans le cadre de ses travaux de recherche, l’équipe expérimentale en hydrodynamique du laboratoire LHEEA de Centrale Nantes a déjà mis en œuvre des asservissements complexes sur des systèmes houlomoteurs. Les calculs temps réels associé aux lois de commande étaient exécutés sur un ordinateur au bord du bassin, impliquant la présence de câbles pour le transfert de données et de puissance électrique. Dans le cas d’un système flottant, la présence de ces câbles introduit des efforts externes sur les maquettes non désirés, souvent non quantifiés. Le contrôleur proposé ici pourra être intégré dans un caisson étanche et embarqué sur les maquettes. Son pilotage, par liaison wifi depuis un PC de supervision au bord du bassin, permettra de limiter le nombre de câbles entre la maquette et la passerelle qui peuvent influencer les mouvements du flotteur.
Impact technique et économique attendu
Ce projet permet à la plateforme d’essais de Centrale Nantes d’offrir aux développeurs un outil innovant de validation de lois de contrôle-commande lors des essais en bassin. Ce nouvel outil vient compléter le panorama des outils de diagnostic déjà associé aux moyens d’essais et ouvre de nouvelles possibilités de prestations.
Centrale Nantes peut maintenant développer des maquettes de système EMR plus complètes, plus performantes, qui intégreront la stratégie de contrôle commande et un système d’acquisition de mesures. Le dispositif sera notammet utilisé dans le cadre du projet WEAMEC SOFTWIND.
Dates clés du projet
- juin à septembre 2018 - Étude de dérisquage avec un contrôleur emprunté
- octobre 2018 - Définition finale du contrôleur et son approvisionnement
- novembre 2018 - Première utilisation du contrôleur (dans le cadre du projet WEAMEC SoftWind)
Résultats
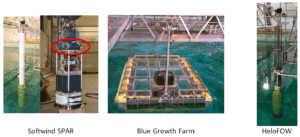
Le projet CrioEMR, financé par Weamec, a permis au laboratoire Lheea de Centrale Nantes de s’équiper d’un contrôleur embarqué pour assurer la mesure et le contrôle d’asservissement sur les maquettes testées en bassins. Cet équipement a notamment servi au développement de Softwind, un nouveau moyen d’essai pour représenter les efforts aérodynamiques sur les maquettes d’éoliennes flottantes et pour tester leurs lois de commandes. Ce système, développé en 2019, a été qualifié et validé lors de la campagne Softwind SPAR en début 2020. Depuis, il a été mis en œuvre pour les essais Blue Growth Farm, plateforme multifonctions alliant aquaculture, éolien flottant et systèmes houlomoteurs, ainsi que pour les essais Helofow, flotteur SPAR d’éolienne flottante incluant la mesure des efforts internes. Il permet au laboratoire d’élargir ses capacités d’essais et de se positionner sur de nouveaux projets de recherche en proposant des techniques d’essais innovantes.