
Background
Marine operations:
- Present at every stage of MRE’s life cycle
- Every technology is concerned
- Diversity, complexity and high cost
- Risk factor (human, equipment, economic)
- Important lever for reducing the LCOE
Scientific advances and innovation
- Multibody modeling with robotics formalism, coupling with hydrodynamics interactions, coupling with large deformation cable models
- Native integration of closed loop control systems including Dynamic positioning systems
Expected technical and economic impact
 Quick modeling of complete installation scenario
Quick modeling of complete installation scenario- Base software components for future development of many innovative engineering specific tools (training, virtual reality, embedded system…)
- High potential for international dissemination thanks to the open source model
Key project milestones
- July 2016 - Project launch
- May 2017 - Solver of constrained multibody systems
- September 2017 - large deformations cable module
- October 2017 - Demonstrator with dynamic positioning
- May 2018 - Demonstrator of installation of the electric hub SEM-REV
- July 2018 - Project completion
- September 2018 - Put at the disposal in open source
Demonstrator
Open source framework for simulating marine operations applied to the immersion of the electrical hub performed on the SEM-REV test site in 2015.
Results
January 2018
The FRyDoM project has now reached its main objectives in tem of complex multibody systems modeling where rigid and flexible bodies may be connected through joints. The global framework architecture is now mature and is showing very good skills concerning its modularity and its extensibility thanks to the use of both the object oriented paradigm and the last C++ programming standards.
The principal modules that are going to allow to address marine operations simulations are implemented :
• Environment modeling (waves, tidal height, current, wind, seabed)
• First order hydrodynamic models for wave-structure interaction
• Current and wind induced force models
• Cable modeling (catenary model and nonlinear finite elements)
• Propeller modeling
• Control algorithms (autopilot, station keeping, dynamic positioning)
• Simulation visualisation
Special attention has been paid to software engineering to ensure quality and durability of the developments.
Until the end of the project, main attention will be paid on validation of simulation results, a better adaptation of the framework’s Application Programming Interface to the offshore specifics, especially concerning mooring systems. Advanced logging and quality visualization modules are going to be further developed. Refactoring and documentation are also planned previously to the release of FRyDoM as an open source framework in September 2018. More representative complex show cases remain a high priority task, to reveal and communicate on the capacities of the framework. In particular the case of the install of the SEM-REV’s electrical hub is going to be modelled.

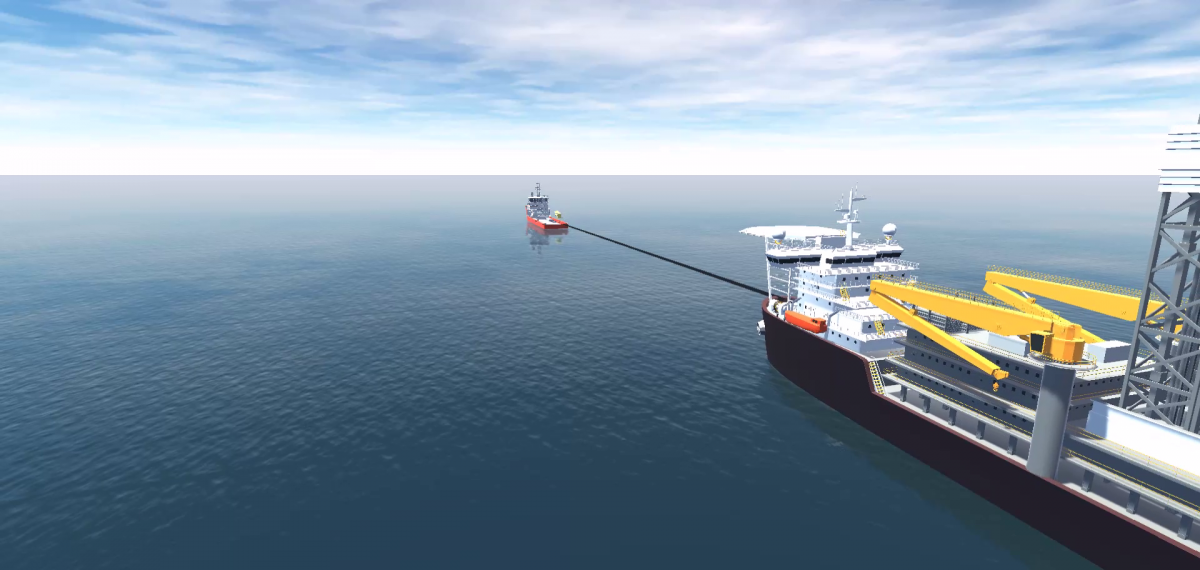
Figure 1 : Offshore platform in waves and current with DP controlled position
D-ICE enginnering is already offering services and collaborative projects that relie on the FRyDoM framework. It is today one of the strategic tools that support the company’s development strategy. A collaboration between D-ICE Engineering and LHEEA lab is expected to add to the framework the capacity to simulate floating wind turbines.
A first presentation of the FRyDoM framework will be held at the ICOE international conference (June 2018, Cherbourg, France). This is going to be the first announce for the open source release of the FRyDoM framework that is expected next September. This will be an opportunity to link contacts in the MRE community and to allow future collaboration ideas to emerge.
Publications and papers published
WEAMEC webinar:
Oral communication
- Kerkeni, S. et al – A Novel & Innovative Open-Source Framework for the Design of Challenging DP Operations – Applications & Perspectives, MTS DP Conference 2018, Houston, TX, USA


