Contexte
Opérations marines adressées par le projet FryDom :
- Interviennent tout du long du cycle de vie des EMRs
- Tout type de technologie concerné
- Diversité, complexité et coût important
- Facteurs de risque (humains, matériels, économiques)
- Levier important de réduction du LCOE
Ruptures scientifiques et innovation
- Modélisation multicorps par des approches robotique, couplage avec l’hydrodynamique, couplage avec une modélisation de câbles en grande déformation
- Intégration native de systèmes de contrôle bouclés incluant des systèmes de positionnement dynamique
Impact technique et économique attendu
![]()
- Modélisation rapides de scénarios complets d’installation
- Brique de base pour le développement futur d’une variété d’outils métier innovants (formation, réalité virtuelle, embarqué…)
- Fort potentiel de dissémination internationale résultant de l’open source
Dates clés du projet
- Juillet 2016 - Lancement du projet
- Mai 2017 - Solveur de systèmes multicorps sous contraintes
- Septembre 2017 - Module de câbles en grande déformation
- Octobre 2017 - Démonstrateur avec positionnement dynamique
- Mai 2018 - Démonstrateur de pose du hub électrique SEM-REV
- Juillet 2018 - Fin du projet
- Septembre 2018 - Mise en open source
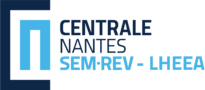
Démonstrateur
Résultats
Janvier 2018
Le projet FRyDoM a aujourd’hui atteint les objectifs de développement fixés en termes de modélisation de systèmes multicorps complexes comportant des liaisons entre des corps rigides et flexibles. L’architecture globale du cadriciel est aujourd’hui stabilisée et montre de très bonnes capacités de modularité et d’extensibilité grâce à la programmation orientée objet suivant les derniers standards du C++ adoptée.
Les principaux modules permettant de se placer dans le cadre d’opérations marines sont maintenant présents :
- modélisation de l’environnement (vagues, hauteur de marée, courant, vent, plancher marin)
- modèles hydrodynamiques du premier ordre d’interaction vague-structure
- efforts dus au courant et au vent
- modélisation de câbles (modèles caténaires et élément fini non-linéaires)
- Modèles de propulseurs
- Algorithmes de contrôle (garde cap, garde position, positionnent dynamique)
- Visualisation des simulations
Un travail soutenu d’ingénierie logiciel a été mené afin de garantir la qualité et la pérennité des développements.
Le travail d’ici la fin du projet portera principalement sur la vérification des résultats obtenus en simulation, une plus grande adaptation métier de l’interface de programmation du cadriciel, notamment sur la question des systèmes d’ancrage, la mise en place de fonctionnalités avancées d’enregistrement des résultats de simulation et de visualisation de qualité, la mise en place des cas tests prévus dans le projet et enfin la préparation du code et de sa documentation en vue de sa mise en open source prévue en septembre 2018. La mise en place de cas de démonstration reste à développer également et constitue un des objectifs principaux de cette fin de projet. Notamment, le cas de pose du hub électrique de SEM-REV sera mis en place sur cette période.
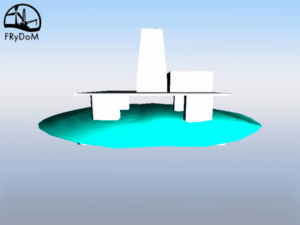
Figure 1 : Plateforme offshore dans la houle et le courant avec un contrôle en positionnement dynamique
D-ICE engineering propose d’ores et déjà des services et des projets collaboratifs mettant en jeu le cadriciel FRyDoM. C’est aujourd’hui un des outils stratégiques dans le développement de la société. Un nouveau développement est prévu en collaboration entre D-ICE et le LHEAA pour adapter le cadriciel à la simulation d’éoliennes flottantes.
Lors de la conférence internationale ICOE qui aura lieu en juin 2018 à Cherbourg, une première présentation du cadriciel open source FRyDoM sera effectuée et annoncera à la communauté EMR sa mise en open source en septembre prochain. Des contacts pourront alors être pris et des idées de collaborations futures émergeront certainement.
Publications et communications produites
Webinaire WEAMEC :
Communication orale
- Kerkeni, S. et al – A Novel & Innovative Open-Source Framework for the Design of Challenging DP Operations – Applications & Perspectives, MTS DP Conference 2018, Houston, TX, USA