


Contexte
Dans le cadre de leurs opérations de développement/financement/exploitation de parcs éoliens, les développeurs sont régulièrement confrontés à la nécessité de quantifier de façon fiable et représentative l’Intensité de Turbulence du vent. Cette évaluation peut notamment permettre de valider le bon positionnement des éoliennes et leur bon dimensionnement en phase de développement, ou encore de mieux évaluer les conditions atmosphériques réelles à hauteur de moyeu en vue d’optimiser le fonctionnement de ses parcs en exploitation soumis à différentes contraintes relatives à l’Intensité de Turbulence. Le moyen de mesure de référence actuel en terme d’Intensité de Turbulence est l’anémomètre à coupelles ou sonique, installé sur un mât de mesure à hauteur de moyeu. Cependant les coûts et contraintes d’autorisations/installations de ce type de solution en mer, ne permettent pas toujours son déploiement. La mesure de la ressource par l’intermédiaire de Lidars installés sur des bouées (LiDAR flottant) est maintenant reconnue et validée sur les projets éoliens en mer en ce qui concerne la moyenne à 10min de la ressource en vent. Par contre, la mesure de l’intensité de turbulence par LiDAR flottant n’est pas encore validée.
Le projet de 24 mois intitulé MATILDA a pour objectif de quantifier l’erreur due aux mouvements de flottaison du système embarqué Lidar sur la mesure de l’intensité de turbulence et de proposer des corrections des données en fonction de l’état de mer.
L’analyse se basera sur la comparaison des mesures Lidar fixes et flottantes réalisées par, respectivement, EDF Renouvelables et AKROCEAN, lors de la campagne de validation du LiDAR flottant WINDSEA, développé par AKROCEAN sur le site de Fécamp (mat de mesure appartenant à Eoliennes Offshore des Hautes Falaises, consortium formé par EDF Renouvelables, Enbridge et WPD Offshore). En préliminaire, la comparaison de mesures de turbulence entre un lidar fixe et de l’instrumentation conventionnelle sera effectuée sur la base de mesures réalisées sur un site opéré par VALOREM. Parallèlement à cette analyse, le dimensionnement d’un dispositif permettant d‘embarquer des systèmes lidars et de leur imposer des mouvements contrôlés en milieu réel sera réalisé dans le cadre du projet MATILDA.
Ruptures scientifiques et innovation
- Traitement de données statistiques de vent obtenues dans des environnements non contrôlés (vent et houle)
- Lois de corrections et algorithmes de traitement permettant une estimation fiable de l‘intensité de turbulence par LiDAR flottant
- Conception d’un dispositif reproduisant des mouvements de flotteurs (bouées ou plateformes d’éoliennes) à échelle 1
Impact technique et économique attendu
Le lidar flottant est une métrologie acceptée pour l’estimation de la ressource éolienne lors des projets de développements de sites éoliens en mer. Le Lidar flottant devient également incontournable pour les sites de développement d’éolien flottant où aucun autre moyen ne peut être déployé. Les moyennes à 10min de la vitesse et de la direction du vent sont les deux grandeurs extraites et sont considérées comme fiables. Pourtant, si cette information statistique est suffisante pour l’estimation de la production d’énergie annuelle, elle se révèle insuffisante si l’on s’intéresse à l’estimation de la durée de vie des éoliennes. En effet, la fatigue structurelle sera directement dépendante du niveau des fluctuations de vitesse dans l’atmosphère, caractérisée en premier lieu par l’intensité de turbulence. La précision de la mesure de l’intensité de turbulence par LiDAR flottant et sa dépendance aux états de mer (période de vagues, hauteur spécifique de la houle, direction de la houle par rapport au vent) ne sont pas clairement établies et les conditions météocéaniques limites au-delà desquelles la correction/compensation est indispensable ne sont pas non plus clairement identifiées.
Le projet MATILDA, porté par le LHEEA (Centrale Nantes/CNRS) s’inscrit donc dans cet effort collectif de la communauté scientifique active sur la caractérisation de la ressource éolienne offshore, en contribuant à la détermination, et à la réduction, de la limite de fiabilité de la mesure d’intensité de turbulence par des systèmes lidar flottants en se basant sur l’analyse de bases de données de terrain et sur la conception d’un dispositif de reproduction contrôlée des mouvements de lidar flottants.
Dates clés du projet
- Octobre 2019 - Lancement du projet MATILDA
- Janvier 2020 - Recrutement du post-doctorant
- Janv-Mars 2020 - Création d’une base de données de comparaison entre un mat météo et un LiDAR profiler fixe
- Janv-Octobre 2020 - Exploitation d’une base de données de comparaison entre un mat météo et un LiDAR profiler flottant
- Décembre 2020 - Lois de correction de la mesure d’intensité de turbulence par un lidar profiler fixe ou flottan
- Décembre 2020 - Cahier des charges d’un dispositif de reproduction des mouvements de flotteur à échelle 1
- Décembre 2021 - Publications des résultats en journaux scientifiques de rang A
Résultats
1/ Étude technologique et bibliographique
Les lidars « profiler » mesurent verticalement un profil entier de couche limite atmosphérique. Le nombre de positions de laser utilisées dépend du modèle de lidar. Dans cette étude, nous nous concentrons sur le lidar WindCube V2 qui possède cinq positions : une verticale et quatre aux angles et selon les notations de la Figure 1.
![Figure 1 : Positions des lasers de lidar profiler [1]](http://www.weamec.fr/wp-content/uploads/2019/10/Figure-1-Positions-des-lasers-de-lidar-profiler-1-300x277.png)
Figure 1 : Positions des lasers de lidar profiler [1]
D=2h tanΦ
Ainsi, le diamètre du cercle de mesure est de 245m à une altitude de 200m. La distance entre les vecteurs de mesure implique deux erreurs de mesure : une erreur de moyenne et une erreur appelée cross-contamination. L’erreur de cross-contamination est due aux équations de la méthode VAD qui se basent sur une décomposition de Fourier du premier ordre des vitesses radiales. Les termes d’ordre plus élevés sont associés à la divergence et la déformation [3].
L’erreur d’estimation des lidars profiler est faible en comparaison aux anémomètres soniques pour la mesure de vent moyen à 10min [2]. Cependant, elle est importante pour la mesure d’intensité de turbulence, et celà pour deux raisons principales : le filtrage des faibles échelles de turbulence à cause de l’important volume de mesure et la contamination par la corrélation des phénomènes entre les deux points de mesure [4]. Des méthodes de post-traitement permettant de limiter l’erreur de mesure de l’intensité de turbulence sont proposées dans la littérature, dont deux ont retenu notre attention : Squeezing [1] et Six-Beams [4].
Le mouvement de mer induit par la bouée implique un balancement du lidar et une incertitude supplémentaire sur la position des points de mesure. L’influence des différents mouvements de la plateforme sur la mesure d’un lidar peut être estimée théoriquement [5]. Toutefois, une étude expérimentale sur une période temporelle représentatives des conditions annuelles permettrait d’évaluer précisément l’ampleur de l’erreur de mesure d’intensité de turbulence en fonction des différents mouvements de la bouée.
Les méthodes permettant la correction du mouvement de la bouée sur la mesure du lidar sont connues [6], elles ont été implémentées pour des mesures de lidar de type Zephir [7] mais aucun algorithme n’a été explicité dans la littérature pour un WindCube V2 flottant.
[1] F. Kelberlau and J. Mann, Better turbulence spectra from velocity–azimuth display scanning wind lidar, Atmos. Meas. Tech., 12, 1871–1888, 2019
[2] Sathe, A., Banta, R., Pauscher, L., Vogstad, K., Schlipf, D., & Wylie, S. (2015). Estimating Turbulence Statistics and Parameters from Ground- and Nacelle-Based Lidar Measurements: IEA Wind Expert Report. DTU Wind Energy.
[3] Browning, K. A. and Wexler, R.: The determination of kinematic properties of a wind field using Doppler radar, J. Appl. Meteorol., 7, 105–113, 1968
[4] A. Sathe, J. Mann et al. A six-beam method to measure turbulence statistics using ground-based wind lidars, Atmos. Meas. Tech., 8, 729–740, 2015
[5] J. Gottschall, B. Gribben Floating lidar as an advanced offshore wind speed measurement technique: current technology status and gap analysis in regard to full maturity, WIREs Energy Environ Volume 6, September/October 2017
[6]J. B. EDSON, Direct Covariance Flux Estimates from Mobile Platforms at Sea, JOURNAL OF ATMOSPHERIC AND OCEANIC TECHNOLOGY, Volume 15, April 1998
[7] F. Kelberlau Taking the Motion out of Floating Lidar: Turbulence Intensity Estimates with a Continuous-Wave Wind Lidar Remote Sens. 2020, 12, 898
2/ Premières exploitations des mesures du site de Fécamp
Sur le site offshore de Fécamp (N:5525385.76, E:300078.33), une base de données contenant les mesures d’un lidar flottant (WindCube v2 – données à 1s), fixe (WindCube – données à 10min) et d’anémomètres à coupelles sur mat de mesure (altitude 58.4m – données à 10min) a été rassemblée grâce aux partenaires industriels AKROCEAN et EDF Renouvelables. Une première étude des mesures a été réalisée, il est considéré ici que le mat a un effet négligeable sur la mesure des deux lidars.
Sélection de 13 semaines de données représentatives
A l’aide de données météocéaniques fournies par AKROCEAN et de la base de données ERA5, 13 semaines de données ont été sélectionnées dans la période du 21/04 au 31/10/2018. Les critères de sélection ont été de maximiser la disponibilité des données et de représenter l’ensemble des conditions météocéaniques des 6 mois. Pour classifier les données, les variables les plus représentatives (Hauteur, période et direction de vague ; vitesse, direction et cisaillement de vent ; précipitations et température) ont été sélectionnées et une méthode de clustering a été mise en place. La méthode de clustering a permis d’identifier sept groupes de données suivant globalement les mêmes tendances pour les 8 variables.
Par la suite, 13 semaines ont été sélectionnées pour représenter l’ensemble des clusters de conditions météocéaniques et pour capter les périodes les plus instables.
Validation des mesures des lidars fixe et flottant
L’altitude de mesure des anémomètres à coupelles étant faible, ils sont utilisés pour valider la cohérence des mesures des deux lidars (fixe et flottant). Ici, les mesures des lidars sont tirées des fichiers à 10min traités par l’algorithme mis en place par LEOSPHERE. On observe sur la Figure 2 que les mesures des deux lidars sont cohérentes avec celles de l’anémomètre en termes de vitesse moyenne de vent. L’étude de l’intensité de turbulence révèle une surestimation globale du lidar flottant en comparaison avec le lidar fixe.
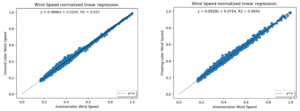
Figure 2 – Régression linéaire de vitesse de vent horizontal des lidars fixe (à gauche) et flottant (à droite) en comparaison aux mesures de l’anémomètre à l’altitude de 58-4m
Évaluation des méthodes de post-traitement des mesures à la seconde
Les corrections algorithmiques de mouvement de mer sur les mesures du lidar flottant seront appliquées aux données à la seconde, il est donc indispensable de mettre en place un post-traitement pour le calcul des grandeurs à 10min. Ainsi, plusieurs méthodes de filtrage de pics (Std ou Wang) et d’échantillonnage des données (1B et 5B) ont été appliquées.
Pour évaluer ces méthodes de post-traitement, l’erreur absolue relative par rapport à la mesure d’intensité turbulente du lidar fixe est comparée à celle mise en place par LEOSPHERE (Process_LEO) sur la Figure 3.
Ainsi, on observe que les traitements appliqués aux mesures à la seconde et la méthode de calcul de l’intensité de turbulence (detrend linéaire et alignement à la direction moyenne du vent) permettent de réduire l’erreur du lidar flottant en comparaison avec le traitement interne du lidar.
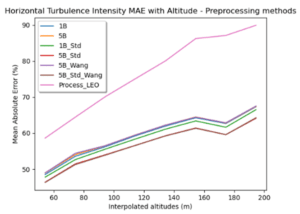
Figure 3: Erreur absolue relative de l’estimation d’intensité turbulente du lidar flottant par rapport à la mesure du lidar fixe – comparaison de plusieurs méthodes de traitement (preprocessing)
Influence des conditions météocéaniques sur l’erreur de mesure du lidar flottant
L’étude des mesures des deux lidars (fixe et flottant) à différentes altitudes associées aux données météocéaniques de ERA5 et de la bouée d’AKROCEAN permet une première évaluation de l’influence des conditions météocéaniques sur l’erreur de mesure du lidar flottant. Les corrélations entre les variables météocéaniques et l’erreur de mesure du lidar flottant en comparaison avec le lidar fixe sont présentées dans la Table 1.
Les données atmosphériques sont estimées par ERA5 avec des données à 1h et les données de vagues sont estimées par la bouée AKROCEAN avec des données à 30min. Ainsi, l’erreur de mesure d’intensité turbulente à 10min induite par le mouvement de mer est moyennée pour correspondre à la temporalité des sources de données météocéaniques.
Cette table est à lire de la façon suivante : plus la hauteur de vague est importante en moyenne dans la demi-heure, plus l’erreur dans la mesure d’intensité turbulente du lidar flottant est importante, cette tendance s’accentue avec l’augmentation de l’altitude de mesure.
| Corrélation positive | Corrélation négative | Accentuation avec altitude |
| Hauteur de vagues, température à 2m, Stabilité atmosphérique | Pluie, intensité turbulente, période de vagues, différence de direction entre vagues et vent | Hauteur de vague, différence de direction entre vagues et vent |
Table 1: Corrélation linéaire entre les variables représentatives des conditions météocéaniques (estimées à 30min ou 1h) et l’erreur absolue de la mesure de turbulence du lidar flottant en comparaison avec le lidar fixe
3/ Modélisation du comportement du lidar flottant
Les mesures de lidar flottant sont évaluées en comparaison avec l’instrumentation fixe dont l’erreur est considérée plus faible que celle de l’instrumentation flottant à cause de la forte influence des vagues. Cependant, les mesures expérimentales de lidar et d’anémomètres fixes sont polluées d’erreurs non maitrisées dues à la technologie utilisée et aux conditions météocéaniques.
Ainsi, la mise en place d’un modèle permet de s’affranchir de cette erreur et de comparer les mesures d’un lidar flottant simulé à une vérité absolue dans la simulation numérique de conditions de vent.
Dans cette étude, le logiciel TurbSim est utilisé pour simuler des tranches de vent turbulent qui sont ensuite empilées pour former une boite de turbulence. Dans cette boite de turbulence, un lidar est simulé en s’affranchissant de la partie optique (Figure 4).
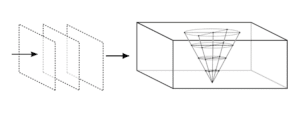
Figure 4: Schématisation du modèle de lidar flottant
La modélisation de vent turbulent par TurbSim se base sur une représentation stochastique de la turbulence, elle ne prend donc pas en compte l’intégralité de la physique impliquée. Ainsi, l’utilisation de cette modélisation pour évaluer les méthodes de correction de mesure de lidar fixe est limitée par la boite de turbulence.
Toutefois, l’ampleur du mouvement d’un lidar flottant dû à la mer est connue par des mesures expérimentales et le modèle peut être utilisé afin d’évaluer les corrections de mouvement de mer. Ainsi, les mesures du lidar flottant corrigé en mouvement pourront être comparées à celle d’un lidar fixe modélisé par la même méthode. L’utilisation du modèle permet donc d’isoler l’effet du mouvement de vague sur la mesure théorique du lidar flottant.
Le modèle implémenté présente des estimations d’erreur de mesure sur la vitesse moyenne du vent comparables aux valeurs expérimentales (1~2%). L’algorithme de compensation de mouvement de mer n’a pas encore été implémenté.
Publications et communications produites
Communications orales :
- Thibault Désert, Sandrine Aubrun, Graham Knapp, Maxime Bellorge, Benoit Clauzet, Romain Barbot. Measurement of the turbulence intensity with a Floating LiDAR System. FOWT 2021, 16-18 novembre 2021
- Thibault Désert, Sandrine Aubrun, Graham Knapp, Samy Kraiem, Maxime Bellorge, Benoit Clauzet, Romain Barbot, Lise Mourre. Error quantification as a function of metocean conditions and correction of wave induced turbulence intensity bias assessed with a Floating LiDAR System. WESC 2021, 25-28 mai 2021
Publications :
- T. Désert, G. Knapp and S. Aubrun, Quantification and Correction of Wave-Induced Turbulence Intensity Bias for a Floating LIDAR System, Remote Sensing, July 2021




